
A Glimpse of Industrial Solusion
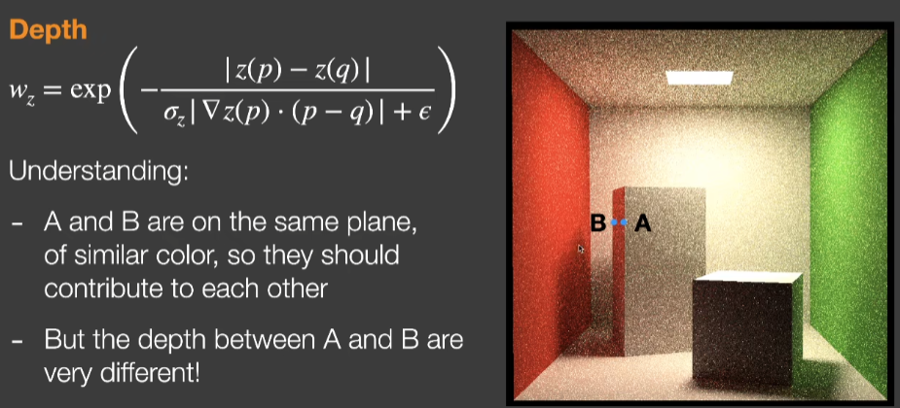
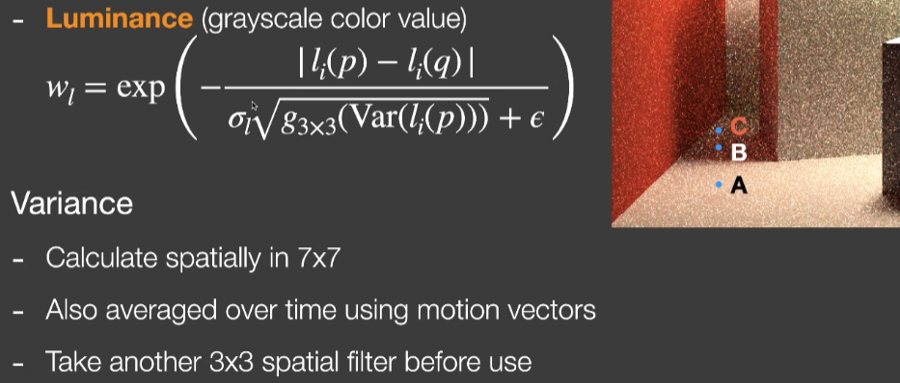
Spatiotemporal Variance-Guided Filtering (SVGF )

Recurrent denoising AutoEncoder (RAE)
基于 G-Buffer 和神经网络的图像降噪

Temporal Anti-Aliasing (TAA)

Space Anti-Aliasing
在同个像素对于每个对这个像素参与贡献的三角形都会进行采样,在硬件光栅化的时候实现

对于采样点的复用

SMAA:Enhanced subpixel morphological AA 图象矢量化,提取为无限分辨率,离散变连续
Temporal Super Resolution 超分辨率方案
避免没有意义的着色
Tiled Shading

Clustered Shading

Level of Detail Solution
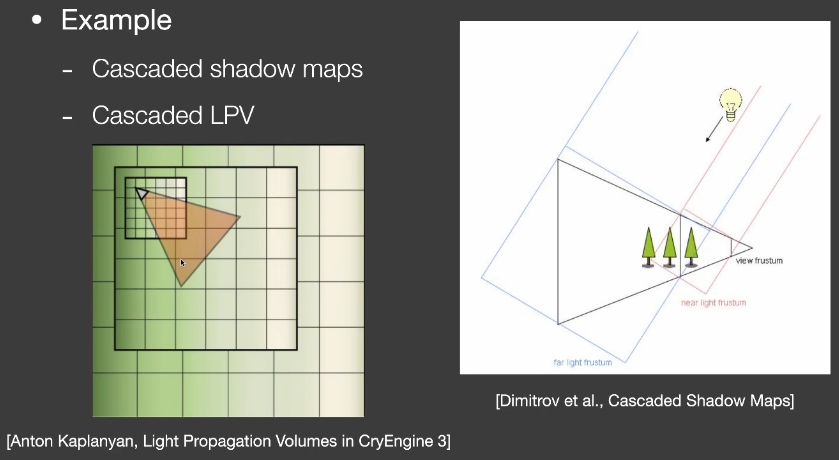
Geometry LOD
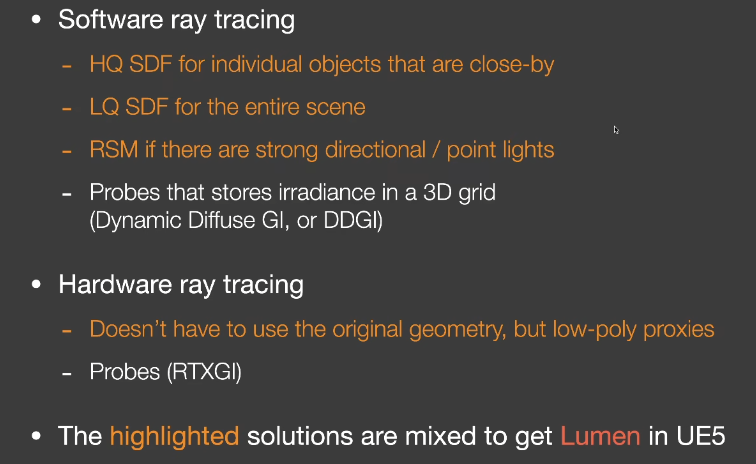
Global illumination Solution
Lumen 是全局光照,是以上方式的结合
最后更新于