左手系统有个好处,当屏幕看作最前方时,所有的物体的坐标都是正值
stack vector ,描述一个几何体,也可以没什么含义
向量加减法
向量、点、t 描述粒子的线性运动或者线段或者插值
向量长度
生成单位向量
点积
求模和判断是否平行
投影
判断点 p 与平面 cn 的关系
粒子运动轨迹和圆的碰撞
叉积
计算三角形的法线和面积
判断点是否在三角形里面
重心坐标,重心坐标插值
Gouraud Shading 重心坐标插值 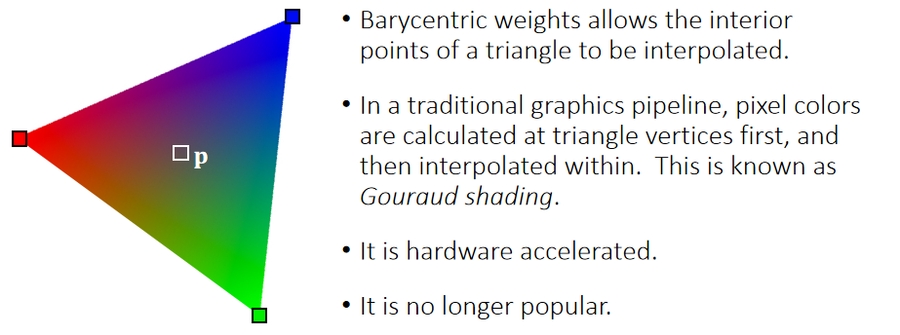
也可以写成 4 * 2 的行列式
负体积的四面体 x3 和底面 normal 同侧为正体积 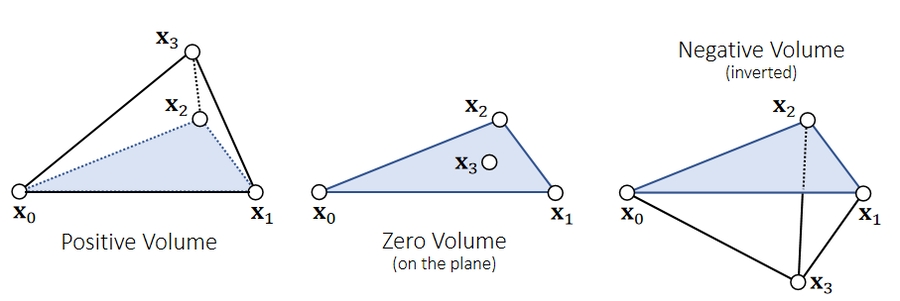
四面体的重心坐标
粒子 P 点和三角形是否发生碰撞
P 和三角形组成的四面体体积为 0 时, P 和三角形所在平面发生碰撞
矩阵
Definition 定义
Symmetric 对称 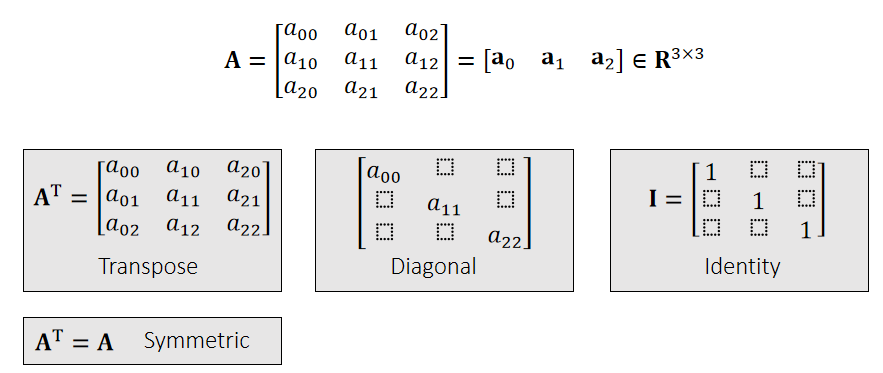
Multiplication 矩阵乘法 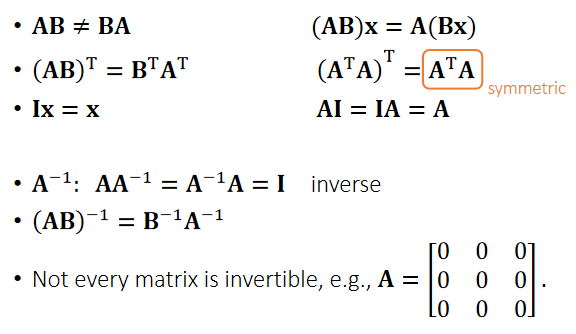
Orthogonality 正交矩阵 由正交向量构成,即都是单位向量,并且它们之间线性无关。  正交矩阵的逆为它转置
正交矩阵的逆为它转置
Transformation 可以使用正交矩阵来表示旋转
旋转矩阵就是局部坐标在世界空间中的表示 LocalToWorld Matrix
对角矩阵可以表示三方向的缩放 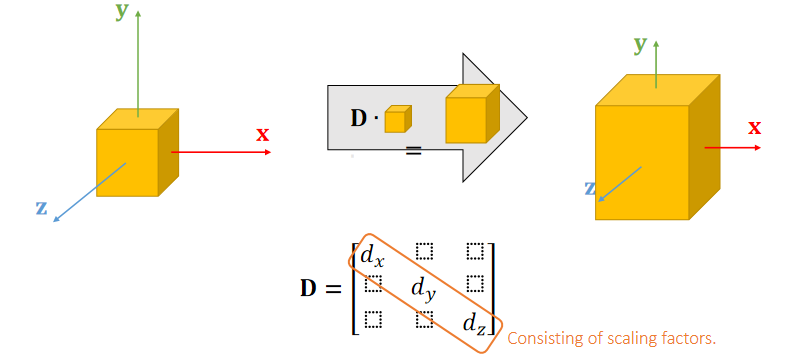
Singular Value Decomposition 奇异值分解
在图形学上的解释,对于任意方向的旋转缩放操作,写成的矩阵。可以分解为 旋转到特定方向的正交矩阵 + 三方向缩放的对角矩阵 + 再次旋转的正交矩阵
Eigenvalue Decomposition 特征值分解
在图形学上的解释。对于任意的对称矩阵,可以分解为 旋转到特定方向的正交矩阵 + 特定方向缩放的对角矩阵 + 反向旋转回原方向的正交矩阵。其中对角矩阵里的值就是特征值
Symmetric Positive Definiteness 对称且正定 s.p.d 矩阵被任意向量两边乘后的标量大于 0
正定矩阵的特征值都大于 0
更广的判定方法是对角占优的矩阵也是正定矩阵 正定矩阵都是可逆的
如果 A 是对称且正定的,那么 B 是对称且半正定的
线性问题 求解 x ,其中 A 是矩阵,b 是边界条件
最直观的解法是求 A 的逆矩阵,还有直接法和迭代法
Direct Linear Solver 直接法,LU 分解
如果 A 是稀疏的,LU 不一定稀疏
Iterative LInear Solver 迭代法逼近
系数 * 迭代矩阵 * 残差
迭代法 M 需要容易求解,可逆
Tensor Calculus
一阶导 1st-Order Derivatives
对向量的求导,求偏导
梯度 :gradient 方向,等高线的最快上升方向,上升速度
一阶导拓展
二阶导
Hessian 的对角是拉普拉斯,注意符号
Taylor Expansion 泰勒展开 对 x0 进行泰勒展开,即 x0 处的值 + 不断地使用梯度逼进
对称且正定在这的二阶项说明二阶项一定是正的
向量模长对向量的求导,即向量长度的梯度,即沿着向量方向的单位向量
H 矩阵是 Tangent stiffness 胡可系数 弹簧对 x 的方程是能量 对 x 的一阶导结果是力, 对 x 的二阶导是胡可系数,力函数的切向量。
两个点的弹簧




































